The Behavioral Urban Informatics, Logistics, and Transport (BUILT) Laboratory conducts research in the area of transportation systems design and modeling. Typical products of this lab may include dynamic operating policies for flexible transport services, pricing and information systems for travelers, decision support tools for evaluating multimodal infrastructure investment strategies, or fleet routing algorithm for autonomous vehicles or other cyber-physical transportation systems. The lab is headed by Professor Joseph Chow.
Led by Professor Eugene Vinitsky, the mission of the EMERGE lab is to make it easy and efficient to develop capable, safe, and intelligent multi-agent systems through learning, simulation, and data. EMERGE emphasizes use-inspired basic research where inspiration is drawn as to what research is needed for specific problems in multi-agent autonomy and transportation. Some key interests are:
Autonomous validation
Building human-like agent models to improve our simulation and safety capabilities.
For the Economic Analysis of Transportation Systems (FEATS), a lab led by NYU Assistant Professor Daniel A. Vignon, aims to inform the design, regulation, and operations of emerging mobility services. Research areas include electric charging infrastructure in the US, ride-hailing services, dynamics of transportation systems, and more.
The Control and Network (CAN) Lab is led by Professor Zhong-Ping Jiang and consists of about 10 people. Research activities in the CAN Lab mainly focus on the development of fundamental principles and tools for the stability analysis and control of nonlinear dynamical networks, with applications to information, mechanical and biological systems.
Building Informatics and Visualization Lab (biLAB), led by Prof. Semiha Ergan, focuses on understanding the operational challenges associated with construction and operation of facilities and infrastructure systems in urban settings. The lab innovates solutions for the operational challenges associated with construction and operation of facilities and infrastructure systems in urban settings.
Urban Mobility and Intelligent Transportation Systems (urbanMITS) Laboratory, led by Prof. and C2SMARTER Director Kaan Ozbay is a multi-modal transportation infrastructure research and education facility combining a series of new concepts, technologies and services to integrate information, vehicles and transportation infrastructure to increase mobility, safety and comfort, and reduce energy waste and pollution. Since its inception, it has been a collaborative effort between the University, state and federal governments, and industry.
The AI4CE (pronounced as “A-I-force”) lab, led by Prof. Chen Feng, conducts multidisciplinary use-inspired research. The lab aims to advance fundamental automation and intelligence technologies such as robot vision and machine learning, while addressing challenges of their applications in civil and mechanical engineering domains.
The Intelligent Urban Transportation Systems (iUTS) Lab, led by Professor Jeff Ban, focuses on the Monitoring, Mining, Modeling, and Managing (4M) of the Urban Transportation Systems (UTS). Research projects of iUTS cut across multiple areas. Current research topics/areas include Urban Systems with emerging technologies, such as Mobile sensing/Big Data/CV (Monitoring, Mining, and Modeling) and Dynamic transportation network modeling (Modeling and Management)
The STAR Lab is an excellent research facility for intelligent transportation systems (ITS) research and education that is directed by Professor Wang . The STAR Lab currently has two fiber optic connections to the WSDOT Traffic System Management Center (TSMC). Real-time loop measurements from over 10 thousands of inductance loops in the greater Seattle area are also available at the STAR Lab. The Lab has its own traffic sensors generating data for research and teaching. Additionally, the STAR Lab has 23 server computers actively used for data management and analysis.
Intelligent Bridge Engineering and Advanced Materials (i-BEAM) Lab, led by Professor Hani Nassif, is a multi-modal transportation infrastructure research and education facility focusing on the structural health monitoring, advanced concrete materials, finite element analysis, traffic and transportation analysis, life cycle cost analysis, etc.
The Piccoli lab, led by Professor Benedetto Piccoli, uses computational biology and mathematical modeling in order to tackle questions in a host of different fields. Ongoing projects range from the study of metabolic pathways in order to better understand tuberculosis treatment to compartmental SIR model optimization in order to better understand the COVID–19 pandemic, to using control algorithms to further the capabilities of autonomous vehicles.
The Performance Assessment of Structural Systems (PASS) Lab, led by Professor Jeffrey Weidner, is focused on delivering novel and timely research centering on the approaches our society utilizes to address, evaluate, and manage our infrastructure. The PASS Lab believes that the current approach to infrastructure management is not sustainable, and are working to find new approaches.
The Border Intermodal Gateway (BIG) Transportation Laboratory is equipped with traffic survey devices (e.g., counters, GPS receivers), video cameras and playback devices, transportation planning tools (TransCAD, VISUM), traffic simulation tools (CORSIM, VISSIM, PARAMICS, DynusT, TransModeler), traffic signal optimization software (SYNCHRO), traffic analysis software (HCS), operation research/optimization program (GAMS), travel behavior modeling software (LIMDEP), mobile source emission estimation software (MOBILE6, MOVES) supported by a cluster of desktop computers networked with a multi-CPU server. Researchers in UTEP also have full access to campus-wide unlimited academic license of ArcGIS and statistical software.
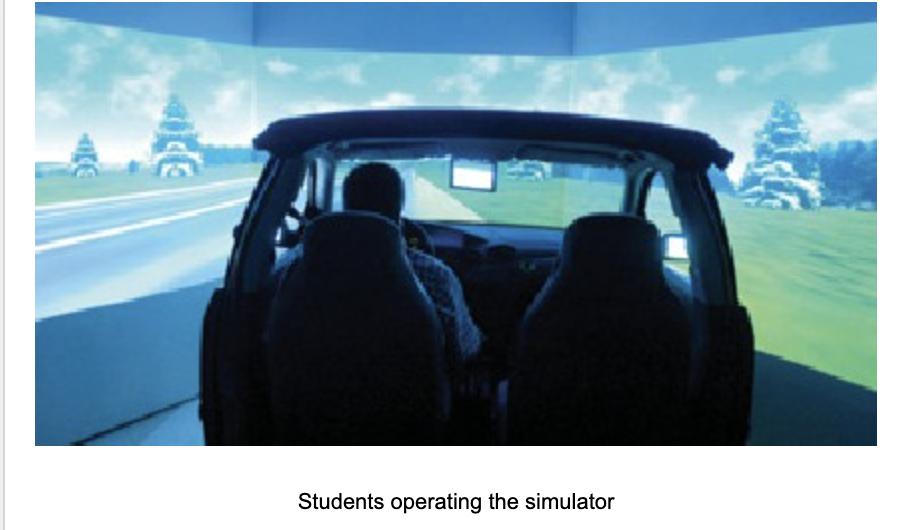
The Driving Simulation Lab has a state-of-the-art motion capable high-fidelity driving simulator. The visual display consists of 3 large screens with 135-degree wide-angle field of view. In addition, auditory feedback is provided through stereo components. A motion – platform provides initial cues in the form of pitch and longitudinal motion. A validated vehicle dynamics program governs the behavior of the vehicles in the simulation. All of these provide a true-to-life, scientifically validated driving experience.
The Mini-TranStar lab in the Department of Transportation Studies was established in 2006 according to an agreement between TSU and Texas Department of Transportation, which allows TSU to access all the real time Closed Circuit Television (CCTV) traffic videos and speed data that are currently available in Houston Traffic Management Center, TranStar. The lab is currently headed by Professor Azimi.
The Mini-TranStar Lab combines the use of a research lab with a real-world Traffic Management Center. This lab can maximize the efficiency and productivity of the research being done in the Department of Transportation Studies.