Challenges in Vehicle Rebalancing for Car Sharing Services
Car sharing is a smart mobility paradigm where a population of users share usage of the vehicles. This can be done through booking vehicles for specific time slots from specific locations that are returned to the same locations (two-way car sharing), such as Zipcar, or through the one-way car sharing business model, which allows users to reserve a vehicle and drop it off at any other station (station-based) or location (free floating) within the system. Examples include Car2Go. Car sharing has been shown to be a very sustainable operating model for cities; Martin and Shaheen (2016) showed that a single Car2Go vehicle can effectively remove 7 to 11 privately owned passenger cars from the road.
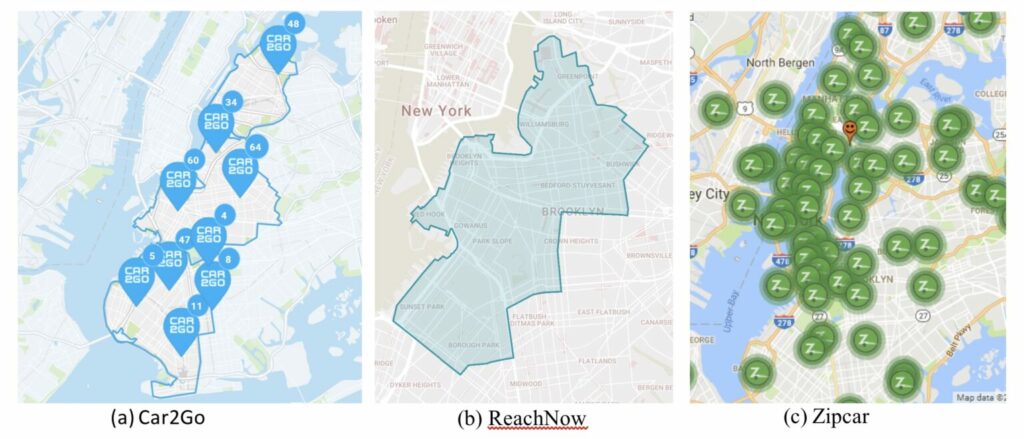
In New York, the largest megacity in the U.S., the competition for car sharing services is on the rise. Car2Go has a fleet of 550 vehicles, while BMW recently launched a 250-vehicle fleet via its ReachNow division in the same Brooklyn region (Flamm, 2016). The figure below shows the coverage areas of three car sharing services in New York City (NYC): Car2Go, Zipcar, and ReachNow. Both Car2Go and ReachNow are free floating, one-way car sharing systems. Other carsharing services have been developed in New York State as well, such as Ithaca Carshare (Ithaca Carshare, 2011) and an EV car share pilot in Buffalo funded by NSERDA.
Vehicle rebalancing is one of the primary challenges of operating a car sharing service. Potential customers may balk from using the service if there is no available vehicle nearby, or no parking location available near the destination. Staff (or incentivizing schemes for travelers) is needed to relocate idle vehicles to make sure there is sufficient demand throughout the system. Recent findings from simulation tests suggest dynamic rebalancing based on queueing networks has promise in helping solve this problem.